研究者紹介
Researcher
工学研究科
システム工学専攻
HONG PU

- 研究テーマResearch theme
- Research on the Development of a Lower Limb Motor Function Diagnosis System
- 研究内容の概要Overview
- The precise evaluation of human lower-limb muscle strength is a cornerstone of rehabilitation medicine, sports science, and the development of robotic assistive devices. Traditional methods, such as isokinetic dynamometry, measure net joint torque but fail to isolate the contributions of individual muscles, particularly crucial bi-articular muscles like the gastrocnemius which coordinate multi-joint movement and power transfer. This research gap limits therapeutic interventions and the biomimicry of assistive technologies. Our research aims to address this by developing and validating an integrated methodology to precisely determine the torque contributions of individual lower-limb muscles during isometric contractions.
Our approach synergistically combines experimental measurement, theoretical modeling, and computational simulation. Experimental Measurement: We developed a Foot Tip Force Measuring Device (FTFMD) equipped with a six-axis force sensor. Subjects performed maximal isometric contractions in multiple directions (knee extension/flexion, ankle dorsiflexion/plantarflexion). This captures the maximum output force envelope, known as the Output Force Distribution (OFD).
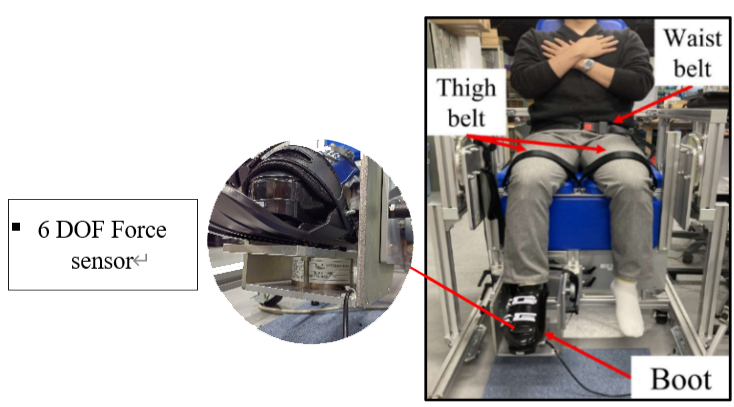
Measurement posture when measuring the foot tip force
Theoretical Calculation: We employ the Functionally Different Effective Muscle Theory. This model simplifies the complex musculoskeletal system into a 2D model of five functional muscle groups for knee and ankle joints. The measured OFD is analyzed geometrically. Since the bi-articular muscle has no direct antagonist, its torque vector is directly derived from the geometry of the OFD hexagon.
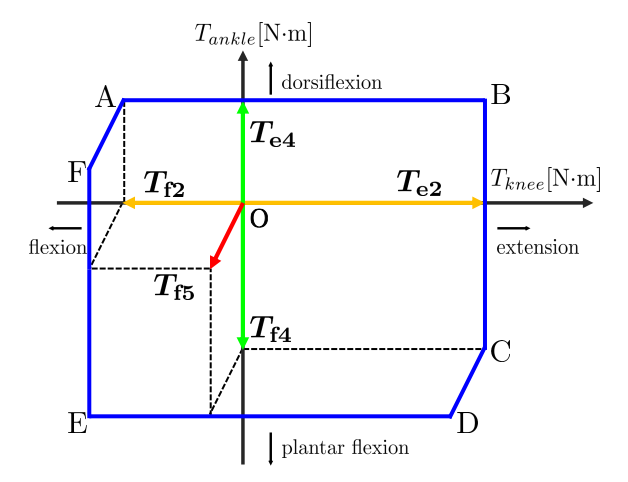
OFD of joint torque determined by muscle group torques
- 研究成果をどのように社会に役立てるか
(還元の構想)Giving back to society - This research will be translated into two key social contributions: Precision Rehabilitation: A clinical diagnostic tool providing therapists with a muscle-specific strength profile to create highly targeted training programs, improving recovery outcomes.
Walking assistive Robot: The data will inform the design of exoskeletons that assist movement in a better way.